随着人工智能技术的飞速发展,机器人技术正逐步融入我们的日常生活和工业生产中。机器人操作系统(ROS)作为机器人开发的重要平台,其最新版本ROS 2在实时性、分布式系统和安全性方面有了显著提升。结合强大的物理仿真软件Gazebo 9,开发者可以在高度逼真的虚拟环境中进行机器人算法测试与优化,特别是目标跟踪这一关键技术。本文将以zhangrelay在CSDN博客专栏中分享的实践经验为基础,探讨如何利用ROS 2与Gazebo 9实现目标跟踪,并分析其在信息技术咨询服务领域的应用前景。
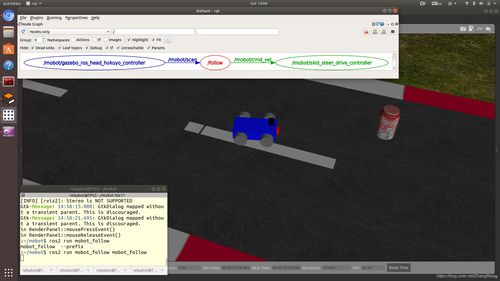
目标跟踪是机器人感知与决策的核心环节,涉及计算机视觉、传感器融合和运动控制等多个领域。在ROS 2框架下,开发者可以利用其模块化设计,轻松集成视觉处理节点(如使用OpenCV库)和运动控制节点。Gazebo 9则提供了丰富的仿真环境,支持多种传感器模型(如摄像头、激光雷达)和物理引擎,使得目标跟踪算法可以在接近真实世界的场景中进行验证。例如,通过Gazebo 9搭建一个包含移动机器人和动态目标的仿真场景,开发者可以测试跟踪算法的鲁棒性和实时性,而无需依赖昂贵的硬件设备。
实践过程中,首先需要配置ROS 2环境并安装Gazebo 9插件,确保两者能够无缝协作。接着,设计一个简单的目标跟踪流程:使用Gazebo 9中的摄像头模型捕获环境图像,通过ROS 2话题(Topic)将图像数据传输到处理节点,利用人工智能算法(如基于深度学习的YOLO或传统图像处理技术)识别并跟踪目标,最后输出控制指令驱动机器人运动。zhangrelay的专栏详细介绍了代码实现步骤和常见问题解决方案,例如如何处理图像延迟、优化跟踪精度等,为初学者提供了宝贵的参考。
从信息技术咨询服务的角度来看,这种基于仿真的目标跟踪实践具有重要价值。咨询服务公司可以为客户提供定制化的机器人解决方案,通过ROS 2与Gazebo 9的仿真测试,降低开发风险和成本。例如,在仓储物流、安防监控或智能家居领域,目标跟踪技术能提升机器人的自主导航和交互能力。咨询服务还可以涵盖系统集成、性能优化和培训支持,帮助客户快速部署人工智能驱动的机器人系统。随着ROS 2生态的完善和Gazebo仿真能力的增强,目标跟踪技术将在更多行业中得到应用,推动自动化与智能化转型。
ROS 2与Gazebo 9为目标跟踪实践提供了强大工具,结合人工智能算法,开发者能够构建高效的机器人系统。通过借鉴像zhangrelay这样的技术分享,信息技术咨询服务可以更好地服务于创新项目,促进技术落地与产业升级。